…es wird scharf 🙂
Bei sehr schnellen Teleskopen ist es oft ein Graus die richtig scharf zu stellen. Eine gute Hilfe hierfür ist ein Fokusmotor. Die billigeren beginnen bei ~200 Euro und die wirklich benutzbaren dann in der Regel um die 400-600 (wenn man den richtigen Okularauszug hat!!!)
Da mein Hauptteleskop und das Leitrohr schon recht alte Schinken sind, gab es nur den manuellen Motorfokus – hilft schon, aber die Präzision lässt sehr zu wünschen übrig. Daher habe ich beschlossen, den völlig überteuerten Motor mit Batterie und 2 Taster, gegen eine Selbstbaulösung zu tauschen.
Als erstes habe ich mir einen Stepper-Hat für den Raspi besorgt (Adafruit lässt grüßen) und dazu einen NEMA 17 Stepper mit Planetengetriebe. Verflucht – der ist so stark dass er den Okularauszug ernsthaft beschädigen könnte wenn man ihn zuweit drehen lässt 🙂
Also dann den kleinen Nema 17 ohne Getriebe geshopped und mit dem geht das dann schon deutlich sinniger.
Nach einigen Entwürfen in Blender hab ich dann auch eine benutzbare Halterung herausbekommen:
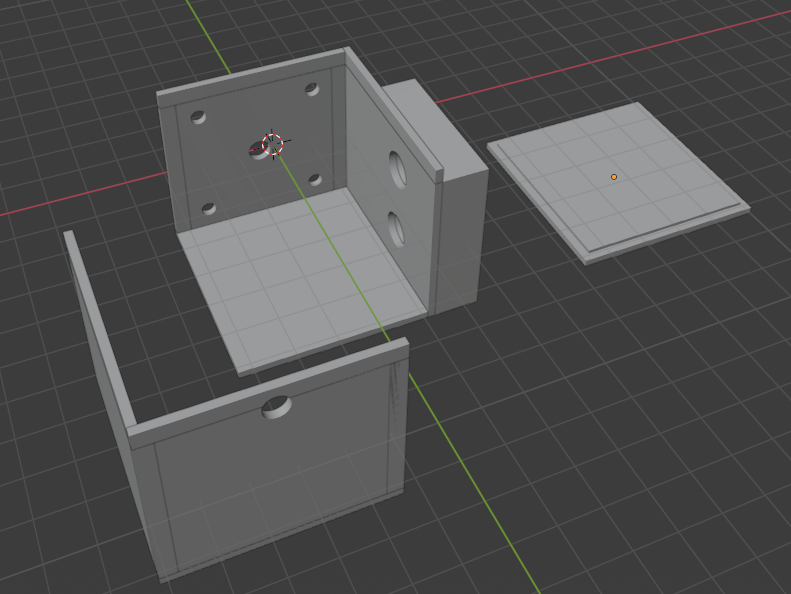
so sieht es dann in der Realität aus:

Den Motor und die Welle des Fokusrädchens nun mit entsprechenden Zahnriemenscheiben ausgestattet und viola – mit etwas Fluchen und Heißkleber passt alles und die Änderungswünsche an der Halterung notiert 🙂

(Änderungswunsch: Langlöcher sind der Hit! So bleibt es justierbar und man muss nicht alles perfekt genau vorher messen/ausrechnen! Habe ich dann später auch damit umgesetzt)
Da mir immer noch das Horrorszenario vom endlos drehenden Motor und dem abgeschraubten Okularauszug im Kopf herumgeistert… Ein Endschalter muss her! Und damit keine Kabel herumfliegen, muss eine passende Steuerleitung mit ausreichend Adern her:
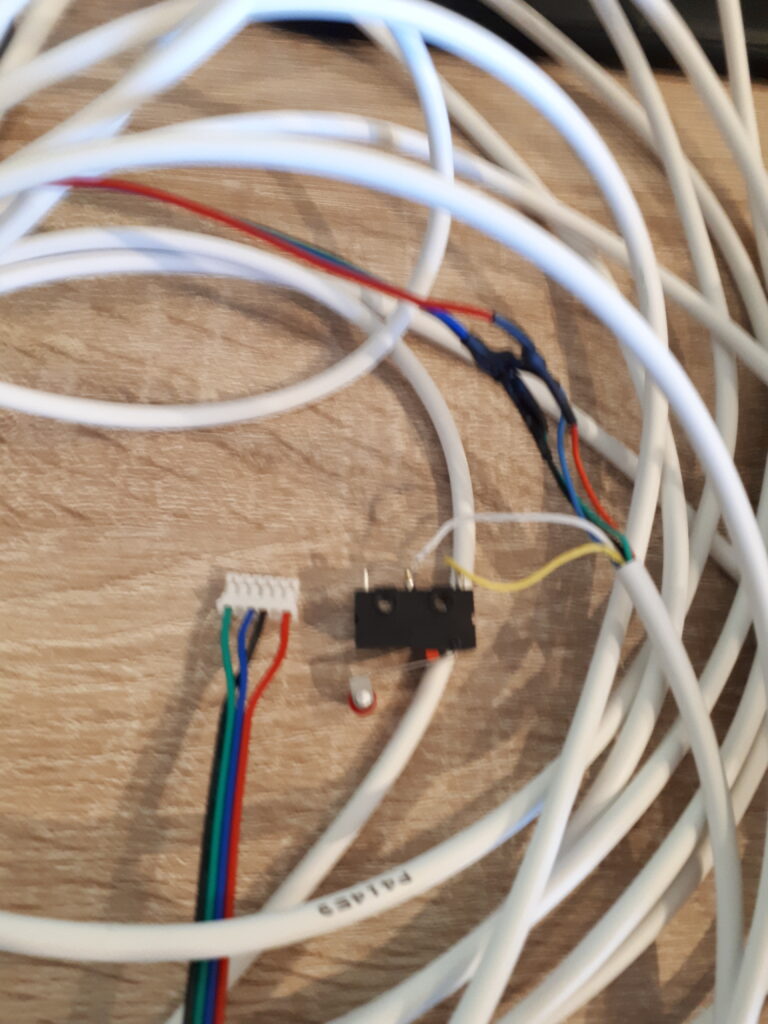
Passt. So kann nun nichts mehr schief gehen 😀
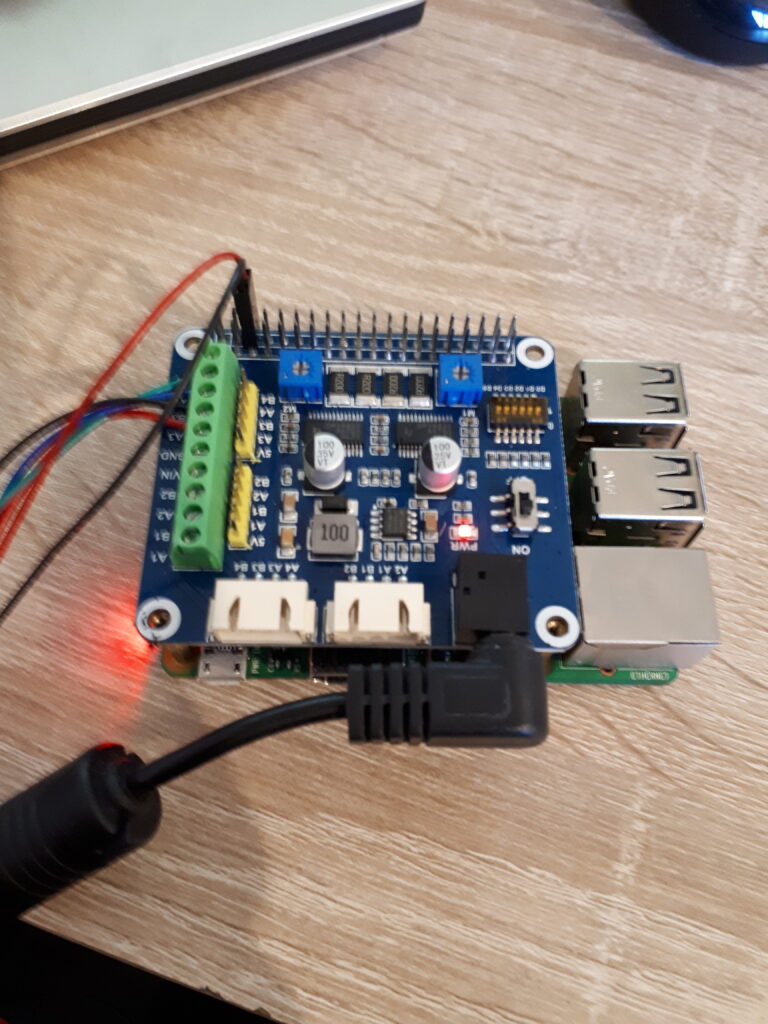
So schaut der Raspberry mit aufgesetzten Stepper-Hat aus:
Dann die Kabel in das Gehäuse packen…
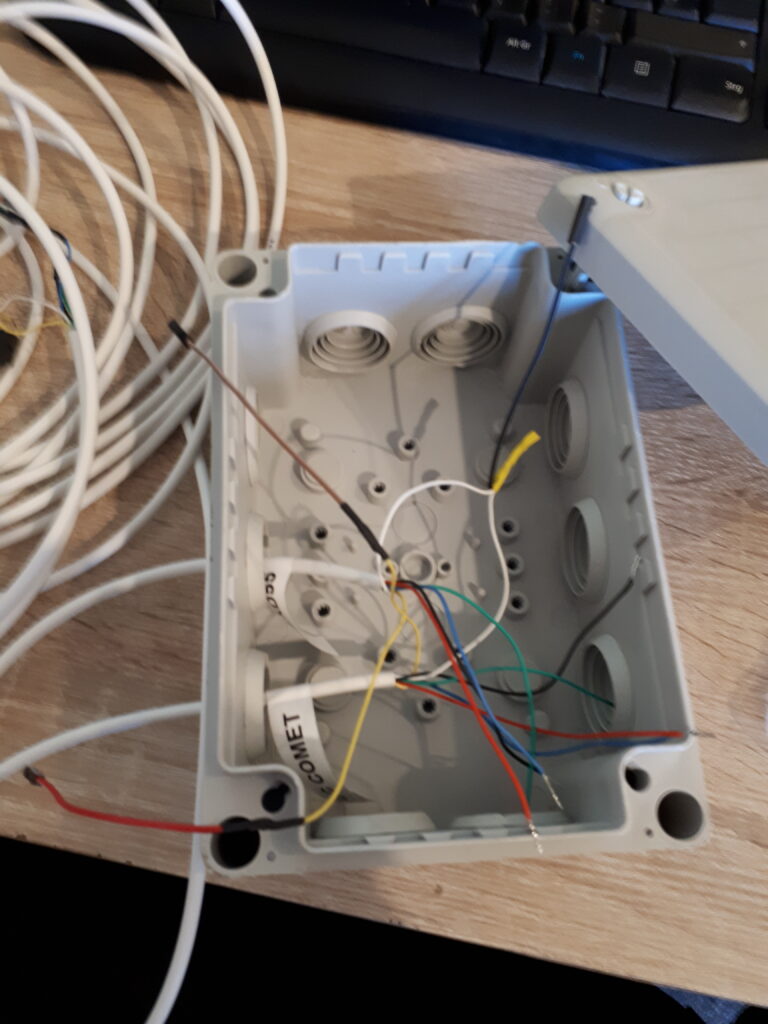
und dann den Raspi…

Ja ich weiß – Heißkleber ist nicht die beste Methode den Raspi zu verankern 😉 aber immerhin hält es. Die beiden Muffen beim USB und beim Netzwerk kann man entfernen falls man mal direkt ran muss.
Dann fehlt noch der Hat:
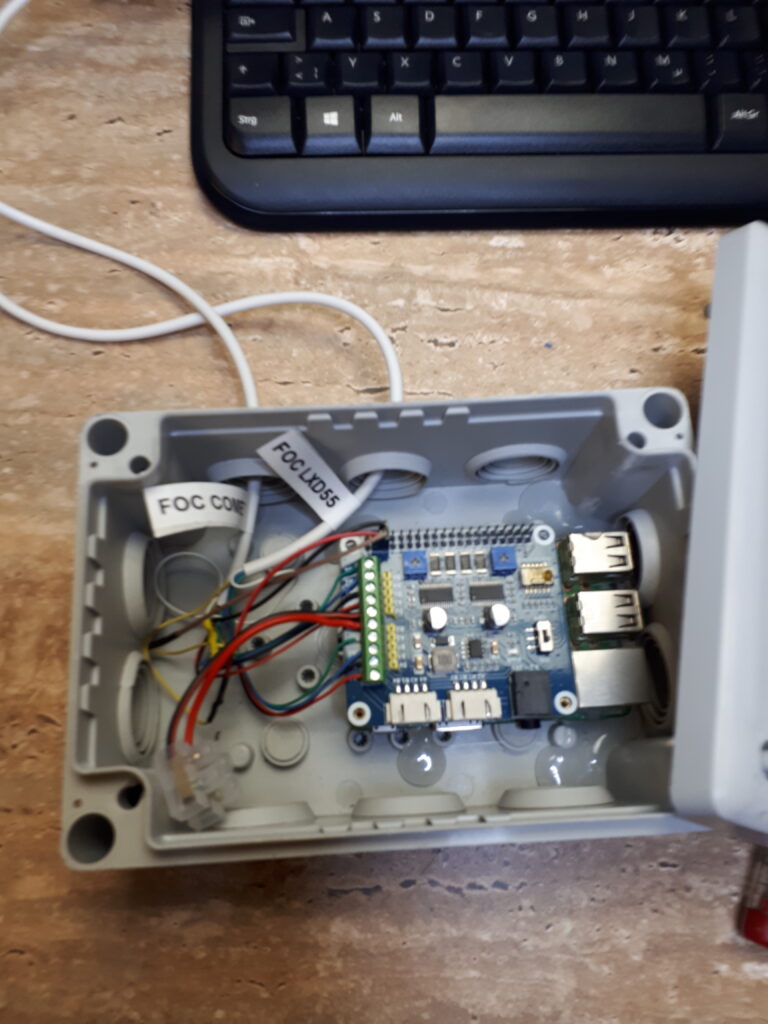
…so und nun sieht das auch schon deutlich ordentlicher aus 🙂
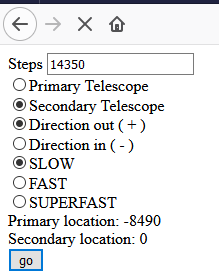
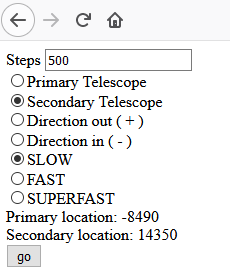
Die Ansteuerung läuft per Python Script mit einer kleinen PHP basierten Weboberfläche. Fährt der Motor beim reinfahren auf den Taster, stoppt er unmittelbar die Fahrt und merkt sich (genau wie nach jeder erfolgreichen Fahrt) die Position. So ist es möglich per Goto auf eine vorher bestimmte Position zu fahren. Sehr hilfreich wenn man verschiedene Kameras/Okulare benutzt.
Einzig wie ich das mit dem Justieren mache habe ich noch nicht entschieden. Da die Stepper keine Encoder haben (was will man für 7 Euro je Stück auch erwarten :-)) wird die Präzision mit jeder langen Fahrt ungenauer. Wie stark sich das auswirken wird, wird die Zukunft zeigen. Ein Justierprozess könnte so aussehen:
- Fahre 2 Millionen Schritte nach innen
- Sobald der Taster auslöst ist Null erreicht und der Zähler wird auf 0 gesetzt
- jetzt kann man jede gewünschte Position (im PLUS) anfahren 🙂
Der Raspi wird sobald alles ein paar mal sauber funktioniert hat noch ein finales Mal aktualisiert und dann wird er readonly geschalten um die SD Karte zu schonen.
Jetzt warte ich auf die erste Gelegenheit das auch mal in der Praxis auszutesten… Fortsetzung folgt 😉
(last update 2021-05-20 21:30 Uhr)